2024-09-12
中国已成为全球最大的工业机器人市场,这得益于制造业对自动化需求的增长,自动化也成为中国未来经济增长和提升全球竞争力的关键战略。" ——先进自动化协会 (A3) 主席 Jeff Burnstein
2024-08-28
2024年8月23日,北京——在2024年世界机器人大会上,CubeMars作为参展商展示了品牌旗下全系列的电机产品,引发广泛关注。此次展会汇集了全球机器人领域的顶尖专家、投资人和创新企业,共同探讨机器人技术的前沿趋势和投资机会。作为行业的年度盛事,机器人大会创投论坛不仅为与会者提供了深入交流的机会,还揭晓了“中国最具投资潜力机器人公司TOP20”榜单,对行业发展具有重要指导意义。
2024-08-28
想象一下,你走进一家购物中心,一位身高1.7米、体重约70公斤的“机器人店员”亲切地向你问好:“有什么可以帮到您的吗?”
2024-08-22
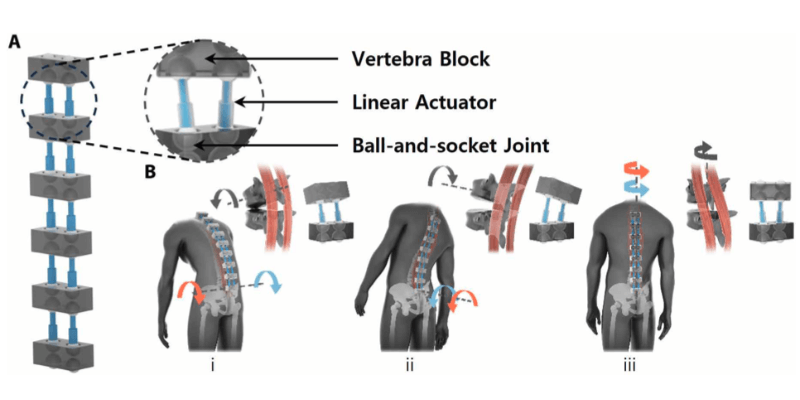
在现代工业和高强度劳动环境中,重复性举重常常导致脊柱和背部肌肉的损伤,尤其是腰椎损伤。这一问题在工作场所中普遍存在,已引起了广泛关注。为应对这一挑战,外骨骼技术被开发出来,旨在提供有效的支撑,减轻身体负担,并提高工作效率。
2024-08-21
在工业自动化和机器人技术的快速发展中,企业对于高效、精密的动力需求日益增加。CubeMars最新推出的AKE准直驱电机,凭借其卓越的性能和创新的设计,给市场提供了一个更具竞争力的选择。
2024-08-21
在每一个关于人形机器人的视频下都会有人问:为什么执着于研究人形机器人呢?双足、四足或者轮足都不可以更好的适应工作环境吗?
2024-08-12
随着2024年巴黎奥运会的圆满落幕,全球的目光正转向同样备受瞩目的残奥会。这一盛事不仅是竞技体育的高潮,更是人类精神和创新的伟大展示。