ユーザー登録

四足歩行ロボット(ロボット犬)を評価する際、歩行パターンだけが全てではありません。本当の課題は、不整地に適応し、リアルタイムで動的な安定性を維持できるかどうかにあります。
最近、15歳のエンジニアリング愛好家アルセニー・ミロノフ君が自作のロボット犬を製作し、注目すべきバランステストを行いました。彼はロボットを傾けられる木製ボードの上に置き、一方を徐々に持ち上げて傾斜を作りました。傾きが変化しても、ロボットは安定した姿勢を保ち、滑ることも倒れることもなく、しっかりとバランスを維持しました。
このテストは単なるハードウェアの検証ではなく、制御アルゴリズムとロボットアクチュエーターのストレステストでもありました。わずかな動きにも、
高速なトルク応答
正確な位置調整
滑らかで制御可能な出力
が求められます。これらがなければ、どんなに優れた制御戦略でもロボットのバランスを保つことはできません。
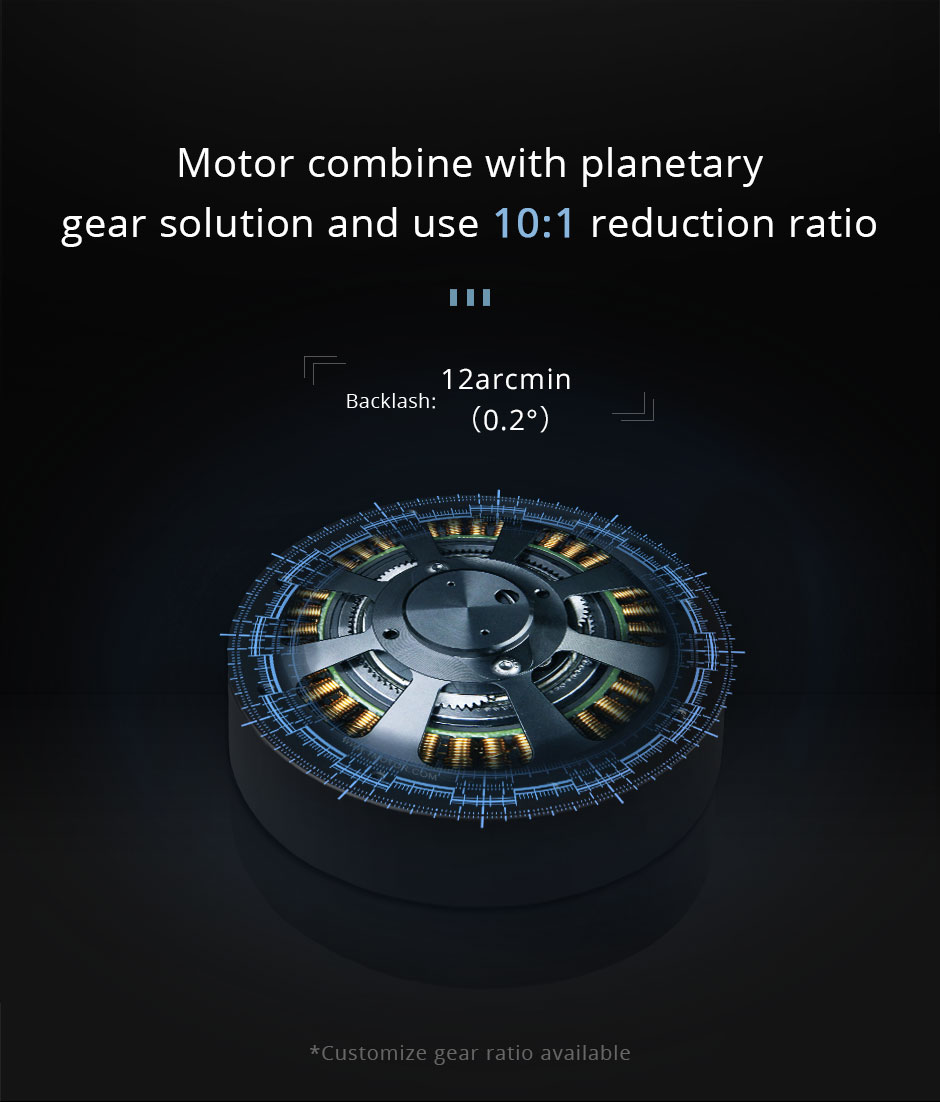
ロボット犬の12個の関節を駆動するため、アルセニー君はCubeMars AK70-10 KV100ロボティックアクチュエーター(24/48V、10:1減速比)を選択しました。この製品は要求の厳しい用途で高い性能を発揮することで知られています。
高トルク密度:ピークトルク24.8Nmで動的負荷に対応
超高速応答:低遅延で高頻度な精密調整が可能
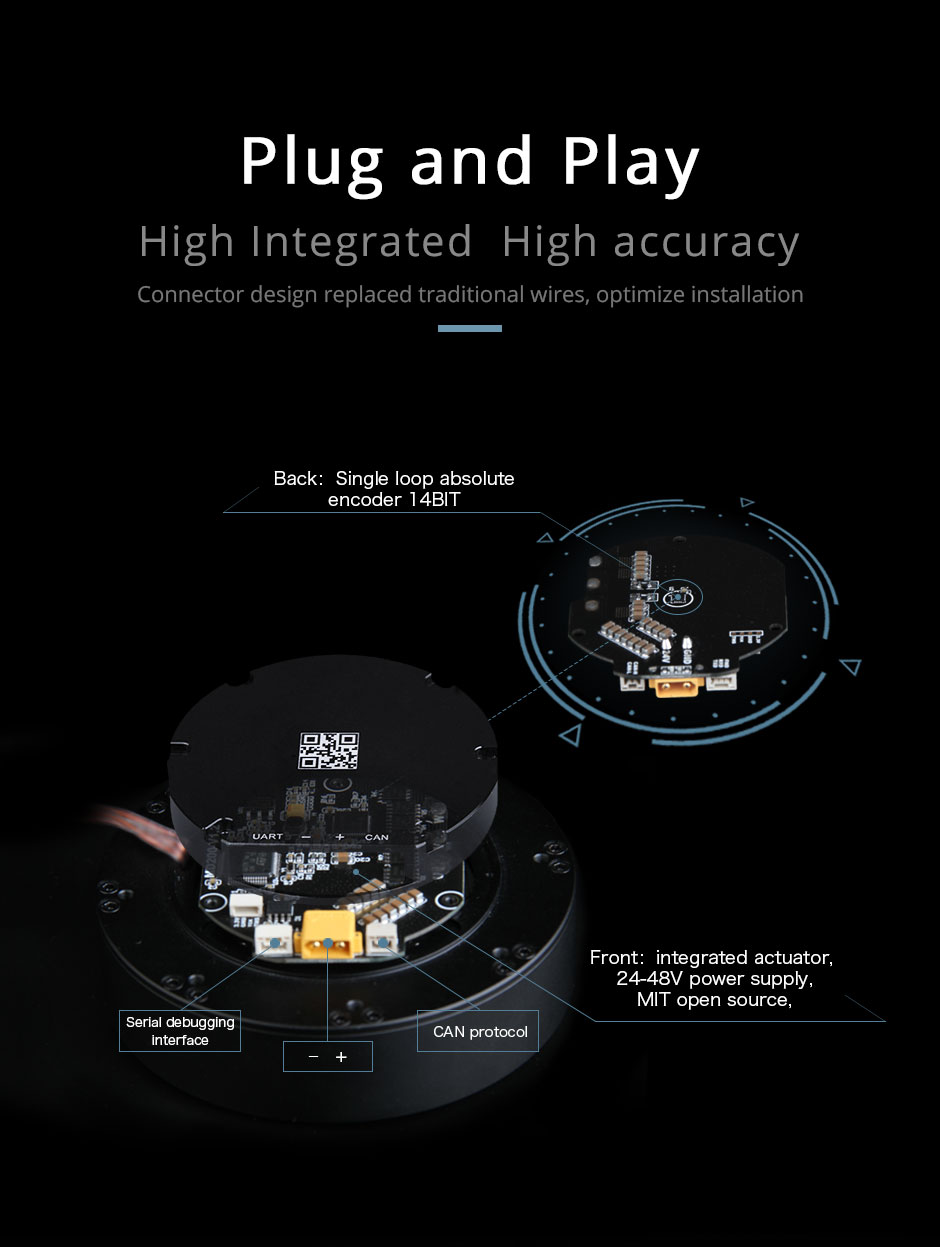
高精度フィードバック:内蔵14ビットエンコーダーでサブミリ精度
コンパクトな統合設計:モーター、遊星ギアボックス、ドライバーが一体化し省スペース
傾斜テストでは、AK70-10 KV100ロボティックアクチュエーターがまるで筋肉の反射のように機能しました。ロボットのバランスがわずかに崩れると、ロボット犬用モーターが即座に調整し、安定した姿勢に戻します。このようなコントローラーとアクチュエーターのクローズドループ連携こそが、動的地形を制覇する鍵です。
CubeMarsは、アルセニー・ミロノフ君のような若きイノベーターがロボティクスの可能性を広げていることを誇りに思います。私たちはロボット犬や四足歩行ロボットなど、次世代クリエイターの挑戦を支える高性能アクチュエーターを提供し続けます。


