Cubemars - 17年电机制造商
info@cubemars.com
+86 13755649079
中文简体
English
中文简体
日本語
Deutsch
Français
한국어
Español
Pусский
CubeMars robot motor logo
产品系列
机器人动力模组
AK系列机器人动力模组
- AK10-9 V3.0 KV60
- AK80-9 V3.0 KV100
- AK70-9 V3.0 KV60
AKH系列中空行星模组
- AKH70-48 V1.0 KV41
- AKH70-16 V1.0 KV41
AKA系列机器人动力模组
- AKA10-9 KV60
- AKA60-6 KV80
准直驱电机
AKE系列准直驱电机
- AKE90-8 KV35
- AKE80-8 KV30
- AKE60-8 KV80
内转无框力矩电机
RI系列内转无框力矩电机
- RI50 KV100
- RI100 KV105
- RI80 V2.0 KV75
RI系列灌封内转无框力矩电机
- RI85-PH KV85
- RI75-PH KV70
外转无框力矩电机
RO系列外转无框力矩电机
- RO100 KV55-标准版标配霍尔
- RO80 KV105-标准版标配霍尔
- RO60 KV115-标准版标配霍尔
云台电机
GL系列云台电机
- GL II云台电机
- GL云台电机
G系列云台电机
水下推进器
SW系列水下推进器
- SW12
- SW17
- SW7
DW系列水下推进器
- DW15
- DW20
- DW25
W系列水下推进器
- W30水下推进器
TW电调系列
应用分类
人形机器人电机
上肢动力
肩关节电机
肘关节电机
腕关节电机
颈关节电机
下肢动力
髋关节电机
膝关节电机
踝关节电机
外骨骼电机
机器人关节模组
四足机器人电机
机器狗电机
医疗机器人电机
康复机器人电机
水下机器人电机
ROV推进器
云台系统
云台电机
产品选型
定制服务
技术支持
解决方案
视频中心
赛事赞助
联系我们
您好
登录
|
注册会员
购物车
购物车没有商品
创建您的CubeMars账号
首页
/
赛事赞助
/
ERC & ARC
/
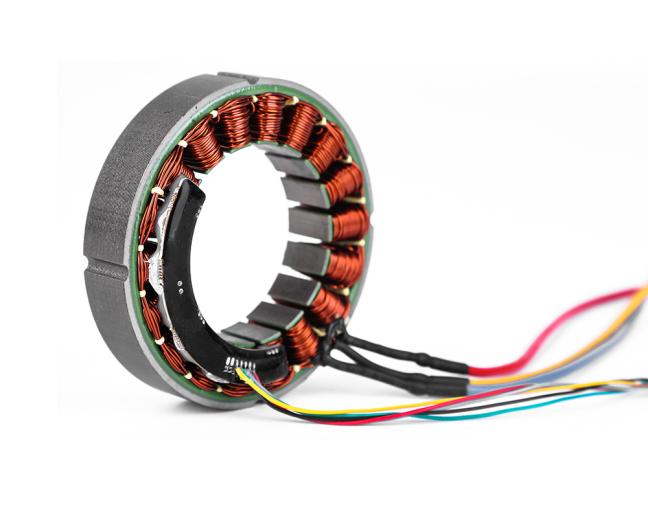
RI80 V2.0 KV75 With Hall Sensor【仅限国外】
收藏 (0)
分享
Facebook
Twitter
RI80 V2.0 KV75 With Hall Sensor【仅限国外】
[ 赞助价 ]
原价:
可用积分:
9900
积分
▏
赠送积分:
9999
积分
【注意】
• 本产品为国外赛事赞助产品,不对于国内销售,如需所购,可直接在【产品系列】选购【RI80 V2.0 KV75】,如有定制需求,可留言联系我们
申请赞助
加入购物车
立即购买
国内免邮
详细信息
加入购物车
留言咨询
用户名
匿名用户
电子邮件地址 *
姓名 *
电话
内容
验证码
热销产品
AKA10-9
GL60 II
AKE90-8
温馨提示
确认
取消
温馨提示
关闭窗口
温馨提示
关闭窗口
您还没有登陆
登录
注册会员
记住我的设置
您忘记密码了吗?
温馨提示
确认
取消
赛事赞助申请表
赛事赞助申请表
获奖情况
电机应用简介